


首页 > bsport体育注册
转换成相应角位移或线位移的执行器。通俗一点讲,当步进电机驱动器 接收到一个脉冲信号,它就会驱动步进电机按设定的方向转过一个固定的角度,就是我们常说的步距角。我们可以通过控制脉冲个数来控制角位移量,从而达到准确的位置控制;同时我们还可以通过控制 脉冲的频率 来控制电机的转速,从而达到调速的目的。
反应式步进电机一般为三相电机,它可以实现大转矩输出,但噪声和震动都很大,所以现在基本已经被淘汰了;
混合式步进电机混合了永磁式和反应式的优点,一般是两相或五相电机,两相的步距角一般为1.8度,而五相的步距角一般为0.72度。
目前市面上绝大多数步进电机使用两相绕组,因此本文我们将重点研究两相双极型步进电机及其驱动器。
永磁式步进电机的转子由永磁性材料制成,N/S极交替分布在转子上;定子由软磁材料制成,上面分布有两相励磁绕组;定子、转子周边没有小齿和槽,通电后利用永磁体与定子电流产生的磁场 相互作用产生转矩。
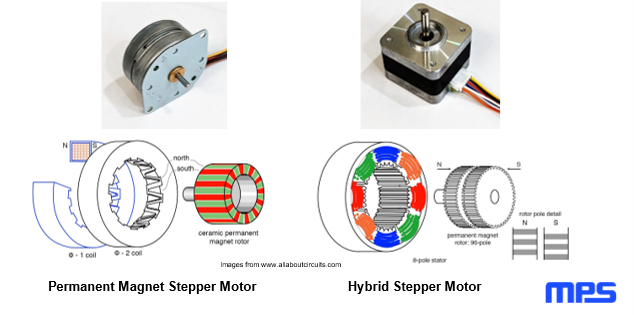
混合式步进电机的定子一般由8个磁极构成,两相绕组错开缠绕在8个磁极上,它的转子结构比较复杂,内部为圆柱形永磁铁,外套软磁性材料,使得一部分被磁化成N极,另一部分被磁化成S极,定子和转子周边有小齿和槽。
虽然这两种电机的结构不同,但都依赖于带有永磁体的转子,通过改变定子线圈上电流的大小和方向来产生变化的磁场,吸引和排斥带有永磁体的转子,使得电机能够朝着一个方向连续转动。
通常我们采用双全桥结构作为驱动电路。前面我们提到通过改变定子线圈上电流的大小和方向可以在磁极上感应出不同的N/S极,进而吸引和排斥带有永磁体的转子来实现电机转动。下面我们以整步驱动方式为例,来看下具体的操作:
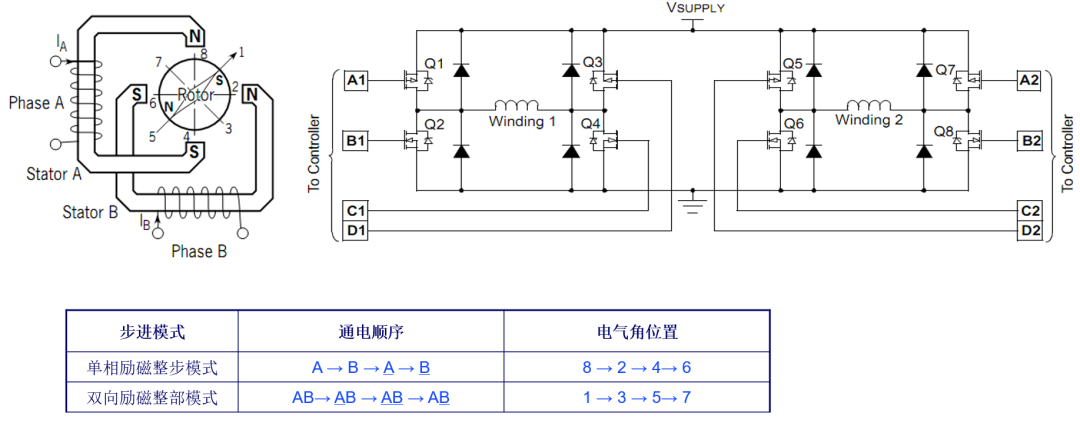
当A相绕组正向通电时,也就是图2中的右图全桥电路中打开Q1和Q4,根据安培定则,会在A相定子磁极 上端 感应出N极,下端感应出S极,转子的S极就被吸引到位置8;B相绕组正向通电时,也就是打开Q5和Q8,会在B相定子磁极 左端 感应出S极,右端感应出N极,吸引转子S极到位置2;同理A相绕组反向通电时,吸引转子S极到位置4;B相绕组反向通电时,吸引转子S极到位置6;如此循环,电机就朝着一个方向转动起来了。
A/B两相正向通电时,A相定子磁极 上端 感应出N极,下端感应出S极;B相定子磁极左端感应出S极,右端感应出N极,转子S极就会被吸引到位置1。A相绕组负向通电,B相绕组正向通电时,转子被吸引到位置3。接下来依次是位置5和位置7,如此形成矢量闭合。
一般来说,步进电机转一圈需要16-400个脉冲信号,其中每转一圈需要200个脉冲信号的步进电机最为常见,它们的定子和转子有50对极,步距角为1.8度。由于电机的机械分辨率受到实际生产制造的限制,很难再通过机械的方式来实现0.9度以下的位置控制。为了进一步提高步进电机的控制精度,我们引入了细分控制。
前面我们介绍了整步模式下的单相驱动和双相驱动,当我们把这两种驱动方式交替的结合在一起,就产生了半步控制。这种控制下 一个电周期内有8个电气角位置,比整步模式多了一倍,因此对于同一个电机转过相同的角度,半步模式需要的脉冲个数也会比整步多一倍。换句话说就是同样数量的脉冲信号,电机转过的角度只有整步的一半,提高了控制精度。
我们将电周期看作一个圆周,以1/4圆周为例(如图3),整步模式下驱动的位置有1和9;半步模式下驱动的位置是1,5,9;继续按正弦电流调制,得到了1/4步,增加了位置3和7……以此类推,两相驱动电流被不断分割得到更小的步进增量,这就是微步。
这里我们提一点,以1/8步为例,一个电周期需要32个脉冲信号,而在机械上一个电周期电机仅仅只是转过了一个对极。所以对于一个50对极的步进电机来说,如果用1/8步电流控制,那么机械上转过一圈就要1600个脉冲!

如图4,在整步模式中,只有一个电流平台被驱动,正负交替,一个电周期内只有4个状态,对应4个电气角位置。
在半步模式中,有两个电流平台,分别是100%电流和70.7%电流,一个电周期内有8个状态;1/4步下有4个电流平台,16种状态;以此类推…
从驱动电流形态上看,如果细分步数越多,两相电流越接近正弦和余弦波形,电机转动会更顺滑,噪音也会更小。
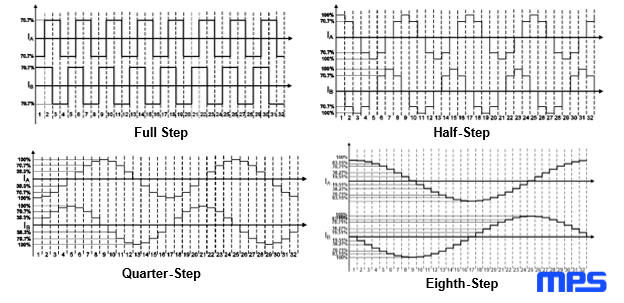
图5是一个典型步进电机驱动IC的内部原理框图。它包含了基本的电源模块,两个全桥电路,门级驱动电路,电流采样电路以及一些逻辑控制单元等。

这其中还有一个用于控制步进的状态机,我们称之为索引器,门级驱动电路根据状态机来驱动后级功率管开通和关断,进而控制相电流的大小和方向,以实现准确的电机位置控制。
图6是一个改进型的步进电机驱动IC,它除了前面提到的这些基本模块以外,还使用了SPI接口,用来访问故障诊断寄存器和其他功能设置。此外,这个改进型驱动器还可以直接测量电机反电动势,可用于转子失速检测,或者速度闭环控制等。
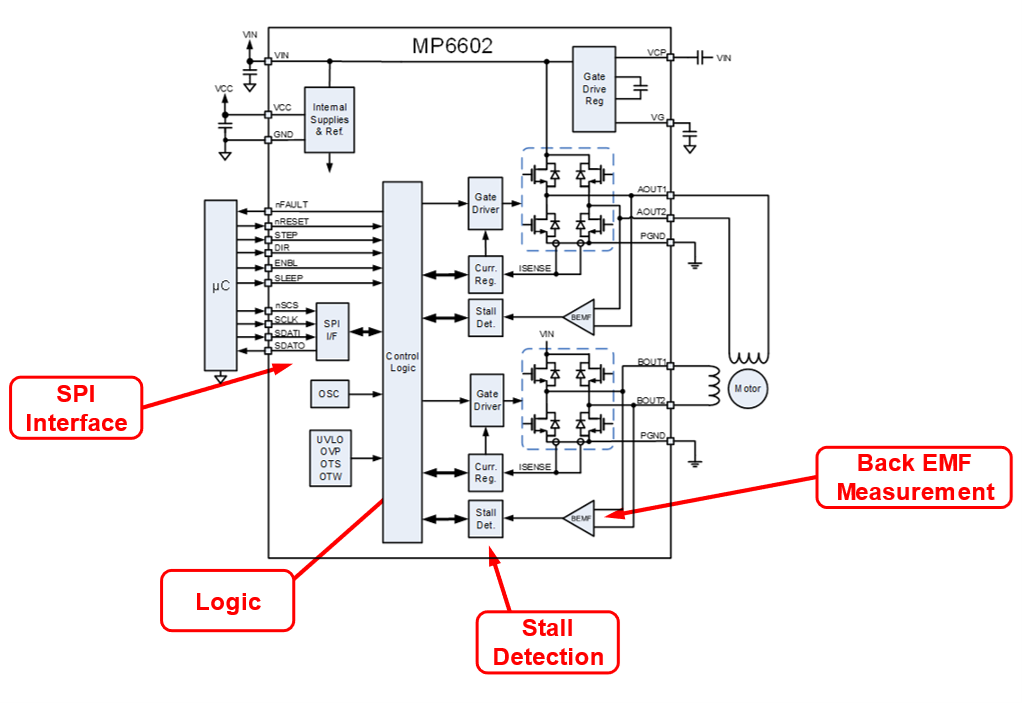
复杂的步进电机驱动器可能还包括运动轨迹发生器,它可以通过编程自动的将电机从静止状态ramp到目标速度,也可以通过一个指令,一定的步数,缓慢回到静止状态。
在典型的步进电机驱动IC手册上,我们通常会在第一页看到一个基本功能列表。上面提到的这些特性都是选择步进电机驱动器时需要考虑的。但正如我们稍后将看到的,其中一些特性只能作为参考,不能认为它们都适用于你的应用。
我们需要关注的第一个重要指标就是输入电压范围,它表征了这颗IC的最大和最小工作电压,电机驱动电压必须落在这个范围内。
接下来是输出电流,它表征了这颗IC驱动负载 输出电流的能力。由于芯片厂商之间没有明确的规范,这个电流可以是持续电流,峰值电流或者其他形式的电流,所以仅仅盯着这个电流数值可能没有太大意义,甚至有时候还会误导你。
MOSFET的导通阻抗对于驱动器真正可以提供多少电流至关重要,它可用于IC发热计算。稍后我们也会详细讨论这一点。
一些步进电机驱动IC具有单独的逻辑电源引脚,逻辑高低电平阈值 与该逻辑电源电压成正比。另外一些则有固定的逻辑阈值。你需要确保逻辑输入电平与你的系统相兼容 – 假如你的逻辑高电平 只能驱动到1.8V,那么当你使用仅为3.3V 逻辑电平 设计的驱动器时,就很有可能会遇到问题。
一些比较老旧的驱动器使用外部采样电阻,每个全桥各需要一个,以提供控制绕组电流所需的电流反馈。这些电阻又大又贵。较新的驱动器一般都将采样电阻集成到IC内部,这样不但可以减少外部所需的元件,而且还减小了布板面积。
不同驱动器之间的步进模式差异很大,从整步到1024微步都有。从某种程度上讲,更精细的步进模式可以使步进电机运行更平稳。但细分步数也不是越高越好,因为它会受到电机自身机械结构的限制,而无法实现更高的细分要求。实际应用上比较常见的微步有1/8步和1/16步。
为了实现高质量的运动控制,绕组电流必须得到很好的调节。确保这一点的一个重要指标就是控制电流衰减的时间。
电机高速运转时会产生较大的反电动势,如果管理不当,可能会导致电流波形失真。一些比较老旧的驱动器采用固定比例的“混合衰减”模式来解决这个问题。而比较新的驱动器,带有内部电流检测,可以实现自动电流衰减,提供了更高效的电流控制。
保护功能在电机驱动IC中是非常有必要的,它可以在发生短路或电源故障等问题时保护IC不受损坏。
在改进型的步进电机驱动IC中通常会使用SPI接口,会做更加完善的故障诊断功能,比如电机失速检测,负载开路检测等等。
最后,IC的封装尺寸也是一个重要的考虑因素。较小的封装可以节省PCB布板面积,但较小的封装通常有较大的热阻,这意味着它们耗散IC内部产生热量的效率较低。这可能会限制驱动器可以提供的最大输出电流。
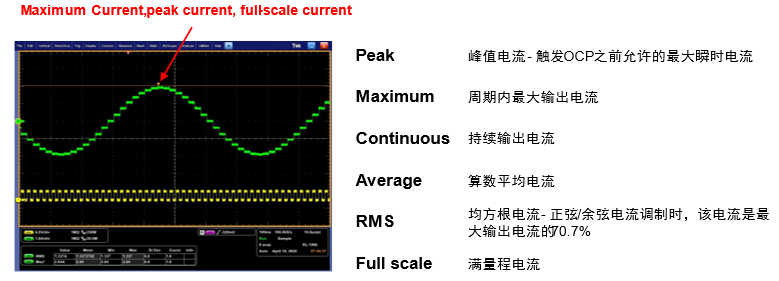
一般来说,peak current指的是峰值电流,它是触发OCP前允许的最大瞬时电流;maximum一般指的是一个周期内的最大输出电流;continuous一般指的是持续的直流输出电流;average是算数平均电流;RMS是均方根电流;full-scale是满量程电流。
比如图9中,波峰时刻的电流,在一些数据手册中,被描述成maximum current,peak current或者是full-scale current。但在另一些数据手册中,这些电流的含义却是不一样的。所以,你必须真正理解它们具体指代的意思,而不是停留在术语本身。
在IC功耗计算中,我们需要用到RMS电流。整步模式下,绕组电流只被驱动到一个电流平台。所以,在不考虑电流纹波时,整步下的RMS电流就等于最大电流;而在非整步模式下,你可以用最大电流乘以0.707,来近似得到RMS电流。
对于IC总功耗的计算,我们需要知道全桥电路率管的导通阻抗,我们用Rds(on)来表示。在步进电机驱动IC中,全桥上管和下管的导通阻抗可能是一样的,也可能是不一样的。在电流调节期间,绝大多数时候,保持全桥一侧下管通,另一侧在PWM,PWM的占空比根据电源电压、电流调节设定值和电机转速等变化。理论上来说,占空比可以在0和100%之间变化,但实际上大多数时候,占空比都是在50%左右变化。
换句话说,在电流调节期间,始终有两个功率管处于导通状态,电流有一半的时间流过两个下管,另一半时间流过一侧的上管和另一侧的下管。
由此我们也可以大致计算出芯片总的有效导通阻。
询价