


首页 > bsport体育注册 > 伺服驱动器
、CNC机床等领域。除了控制转速和位置精度外,伺服电机还可以实现正反转功能。反转操作是工业自动化中经常需求的功能之一。本文将详细介绍伺服电机的反转原理以及相序调整方法。
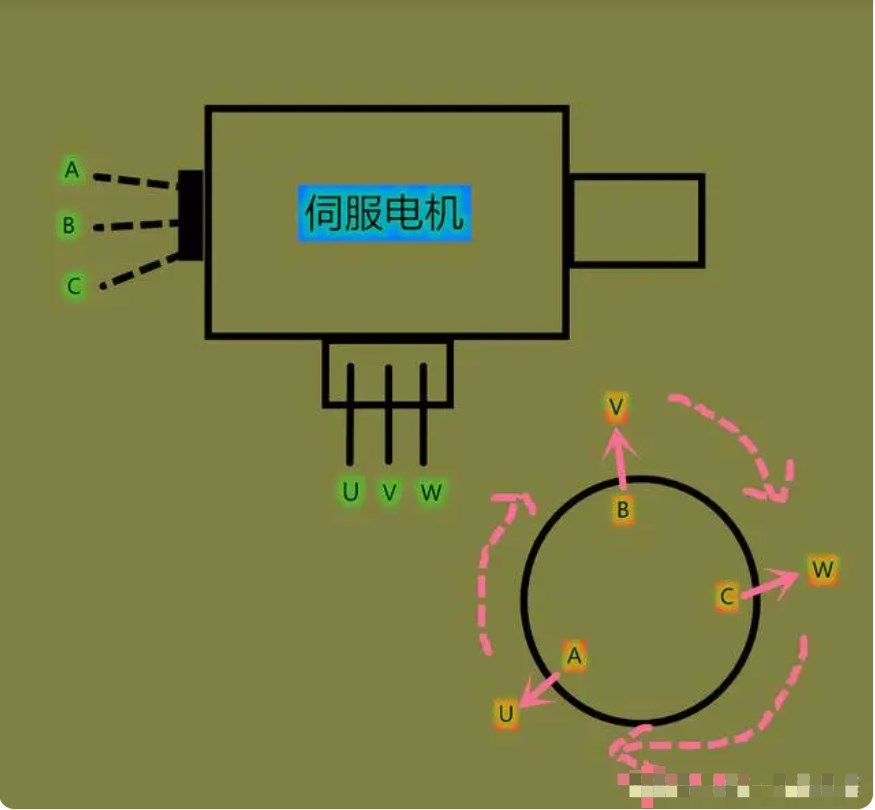
在介绍伺服电机反转原理之前,我们先来了解一下伺服电机的基本工作原理。伺服电机由电机、编码器三部分组成。电机负责提供动力,编码器用于测量转子的位置信息,根据编码器反馈的信号实现对电机的控制。伺服电机的正转和反转通过改变电流的方向来实现。
伺服电机采用的编码器通常是增量式编码器。增量式编码器通过两路正交信号A和B来测量转子的角度。根据A、B两个信号的周期和相位差,可以确定转子的角度和转速。当电机处于正转状态时,A信号可能先出现,然后B信号出现;当电机处于反转状态时,B信号可能先出现,然后A信号出现。根据编码器信号的变化来判断电机运动的方向,并改变电流的方向实现正反转。
伺服电机的相序调整指的是改变编码器的A、B信号的极性,以调整电机的正反转方向。下面介绍两种常见的相序调整方法。
现代的伺服电机通常都具备软件配置功能,可以通过修改的参数来实现相序调整。通常在电机配置界面或参数设置界面,可以找到相序调整选项。用户可以通过修改相序的设置来实现电机的正反转。
另一种相序调整的方法是通过调换编码器A、B信号线的连接方式来实现。通过调换信号线的连接,可以改变A、B信号的相位差,从而调整电机的正反转方向。
- 调换A、B信号线的连接方式,如将A信号线连接到原本的B信号端口,将B信号线连接到原本的A信号端口。
需要注意的是,信号线调换方法需要进行实物操作,因此相对来说操作风险较大,需要更加谨慎。在操作之前务必关闭电源,确保安全。
伺服电机的正反转是通过改变电流方向来实现的。在工业自动化和机器人领域,正反转功能经常被应用到实际控制中。相序调整是实现伺服电机正反转的一种常见方法,可以通过软件设置或信号线调换来实现。根据实际需求和具体的支持,选择相应的方法即可实现电机的正反转功能。
询价