


来源:bsport体育注册 作者:bsport体育登录|发布时间:2024-12-24 12:19:58
等部分组成,其中电机本体是实现机械运动的执行机构,驱动器负责接收控制信号并驱动电机转动,控制电路则负责生成控制信号并监控电机的运行状态。
伺服电机可以控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
伺服电机广泛应用于各种需要精准控制运动的场合,如工业自动化机器人数控机床、医疗设备、航空航天等领域。在工业自动化领域,伺服电机被用于驱动各种自动化设备,如传送带、包装机械、印刷设备等。在机器人领域,伺服电机是机器人关节驱动的核心部件,能够实现机器人的灵活运动和准确定位。在医疗设备领域,伺服电机被用于驱动各种精密医疗设备,如手术机器人、医疗影像设备等。
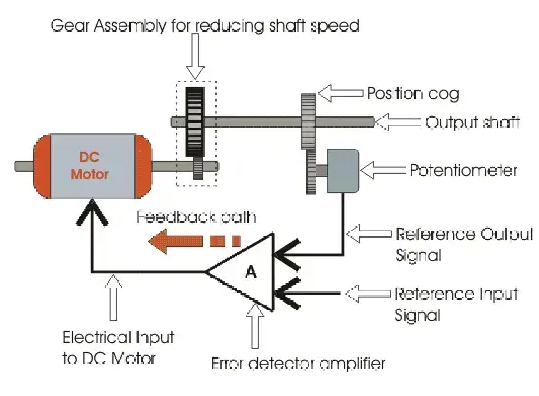
伺服电机被定义为能够精确控制位置(角度)、速度和加速度的执行器。典型的伺服电机由三个主要部件组成:直流电机、控制电路和反馈装置。
控制电路负责接收和处理来自外部的输入信号。这些信号告诉伺服系统要移动到什么位置、速度或方向。控制电路还向直流电机发送电力以驱动它。
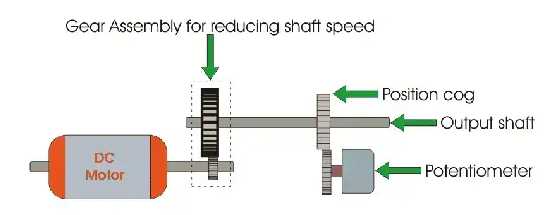
反馈设备将位置数据转发回控制电路,然后控制电路调整直流电机的功率,使实际位置与输入信号中的所需位置对齐。
伺服电机(Servo Motor)是一种能够精确控制位置、速度和加速度的电机系统,广泛应用于需要高精度定位、快速响应和稳定性能的工业自动化、机器人技术、精密加工设备等领域。以下是关于伺服电机的特点介绍:
高精度定位:伺服电机系统通常配备高分辨率的编码器或解析器,用于实时监测电机的位置和速度。这使得伺服电机能够实现非常精确的位置控制,满足各种高精度应用的需求。
快速响应:伺服电机具有出色的动态性能,能够快速响应控制信号的变化。当接收到控制指令时,伺服电机能够迅速调整其转速和位置,以满足系统对速度和位置控制的需求。
高稳定性:伺服电机系统通常使用闭环控制,这意味着电机能够不断地监测其实际位置和速度,并与目标值进行比较和调整。这种闭环控制使得伺服电机具有很高的稳定性,能够在各种负载和环境条件下保持稳定的性能。
宽调速范围:伺服电机通常具有较宽的调速范围,可以适应不同的应用需求。无论是需要高速旋转还是低速精密定位的场合,伺服电机都能够提供适当的速度和位置控制。
大扭矩输出:伺服电机能够输出较大的扭矩,特别是在低速时。这使得伺服电机在需要高扭矩输出的应用场合中具有很大的优势,如机器人手臂、精密加工设备等。
良好的可靠性:伺服电机采用高质量的材料和先进的制造工艺,具有很高的可靠性。同时,伺服电机系统通常配备有各种保护和故障诊断功能,以确保在出现异常情况时能够及时发现并解决问题。
易于集成:伺服电机系统通常具有标准化的接口通信协议,使得它们易于与其他设备和系统进行集成。这有助于简化整个系统的设计和实现过程,提高系统的整体性能和可靠性。
低维护成本:由于伺服电机系统具有较高的可靠性和稳定性,因此它们的维护成本相对较低。此外,许多伺服电机系统还配备了远程监控和诊断功能,可以进一步降低维护成本和停机时间。
总之,伺服电机以其高精度定位、快速响应、高稳定性、宽调速范围、大扭矩输出、良好的可靠性、易于集成和低维护成本等特点,在各种需要高精度控制的应用场合中发挥着重要作用。
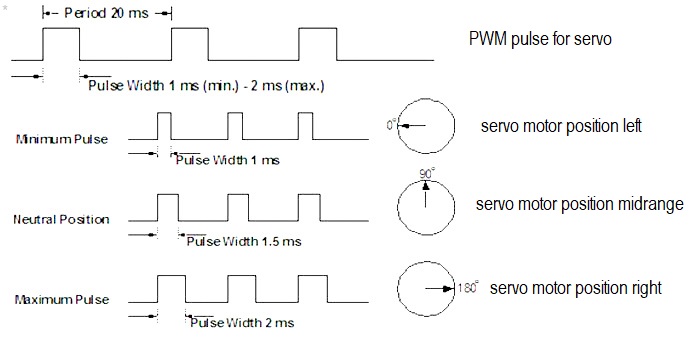
通过向伺服信号线发送 PWM(脉宽调制)信号来控制伺服电机。 PWM 是一种快速打开和关闭信号以产生不同宽度脉冲的技术。脉冲宽度决定输出轴的位置。
例如,当您发送脉冲宽度为 1.5 毫秒 (ms) 的 PWM 信号时,舵机将移至中立位置(90 度)。
当发送脉冲宽度为1ms的PWM信号时,舵机将移动到最小位置(0度)。当发送脉冲宽度为2ms的PWM信号时,舵机将移动到最大位置(180度)。
PWM 信号的频率为 50 Hz,这意味着它每 20 ms 重复一次。在此期间,脉冲宽度可以在 1 ms 到 2 ms 之间变化。
在本教程中,我们将制作一个“伺服电机驱动电路”。伺服电机是一种小型电子元件,有助于以精确的精度旋转或推动机器或设备的任何部分。与通用直流电机不同,我们可以控制伺服电机的角度,因此用途广泛。这些电机用于精确控制角度或线性位置、速度和加速度。也称为旋转执行器或线性执行器。伺服电机可能由用于位置反馈的传感器和用于位置控制的信号输入组成。这些电机有不同的尺寸和额定电压。伺服电机电路用于控制伺服电机的位置,这里我们构建了用于亚微型伺服电机的伺服电机驱动电路。
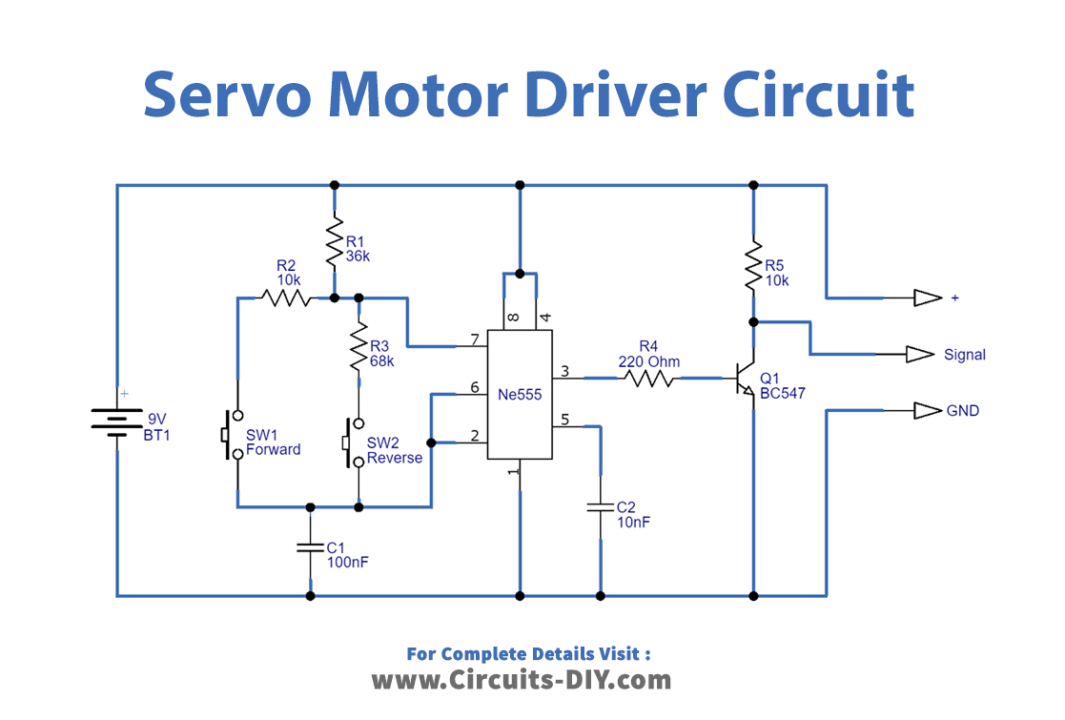
该电路旨在通过使用不同占空比的 PWM 脉冲来提供 PWM(脉冲宽度调制)信号输出。我们可以通过使用微内部的 PWM 模块或定时器来控制伺服电机的旋转和位置。这里我们使用定时器IC555 来生成 PWM。一旦触发 PWM 模块 (IC 555),所选 PWM 通道引脚就会变高(逻辑 1)。达到所需宽度后,它将变低(逻辑 0)。因此,触发 PWM 后,必须启动一个延迟特定 ms 的定时器,并等待定时器溢出。
为了驱动电机,我们首先需要 PWM 脉冲,这就是我们使用 555 定时器 IC 的原因。而晶体管在电路中的作用是放大信号。要了解基于 PWM 信号的伺服旋转,请考虑周期为 20ms、高电平脉冲持续时间为 1ms(最小值)和 2ms(最大值)的信号。根据高脉冲信号的持续时间,伺服电机的旋转会发生变化。
正如我们在电路中看到的,定时器 IC 555 被用作非稳态多谐振荡器。它在输出端产生具有两种不同脉冲持续时间的脉冲,我们知道555中输出脉冲的时间取决于定时电阻和定时电容。对于输出,我们将 Vcc 线连接到 Vcc、GND 与地,并将 PWM 线连接到晶体管的集电极侧。此外,我们在触发器和阈值引脚处连接开关。
所以,当我们施加电压并按下任何开关时。 IC 被触发,阈值引脚将施加的电压与 2/3 Vcc 的参考电压进行比较。当我们按下开关 SW1 时,IC 会产生一个长持续时间的高脉冲。该高脉冲时间将等于 0.693*(R1 + R2) C1,低脉冲时间将等于 0.693R2C1。在这种情况下,舵机以正确的方向旋转。当我们按下开关 SW2 时,该 IC 会产生一个短时高脉冲。该高脉冲时间将等于 0.693(R1 + R3) C1,低脉冲时间将等于 0.693R3C1。在这种情况下,舵机向左方向旋转。根据输出脉冲占空比,伺服电机的旋转方向和速度会发生变化。
内部的转子是永磁铁,驱动器控制的U/V/W三相电形成电磁场,转子在此磁场的作用下转动,同时电
/应用 /
,能够根据控制信号的反馈信息来调整输出转速和位置,具有较高的精度和响应速度,广泛应用于机械控制系统中。本文将详细介绍
【xG24 Matter开发套件试用体验】Silicon Labs 基于 EFR32MG24 Explorer Kit 开发板 开箱试用体验
【飞凌嵌入式OK527N-C开发板体验】4. mpp与播放器+ubuntusdk qt环境搭建