


来源:bsport体育注册 作者:bsport体育登录|发布时间:2024-12-24 12:10:46
Mugatu是由卡内基梅隆大学的机械工程研究团队打造的一个能够自主转向的双足微型机器人,而最令人瞩目的是,它仅由一个电机驱动。这款小巧的机器人在探索狭窄空间、检查机械设备或搜寻灾难现场废墟时具有巨大的潜力。相较于大型机器人,它能够精确地放置步伐,轻松绕过障碍物。
机械工程副教授Aaron Johnson和教授Sarah Bergbreiter带领的研究团队在微型机器人领域取得了重大突破。Mugatu不仅能够自主启动、保持开环步态稳定,还能够控制向左、向右和直行转向。其设计简洁,仅包括两个刚体和一个执行器,却能实现其他复杂机器人的运动。
这个项目的初衷是尽可能简化机器人的步行方式。通过理解缩放对于运动的影响,可以将现有机器人进行适当的调整,以便适应更小的空间或承载更多的负载。团队成员之一,本科生Kendall Hart参与了机器人当前传感器的开发,这是用于计算运输总成本(即一定距离内使用的能量量)的关键部分。
团队的目标是将这些行走机器人缩小到乐高积木的大小,这个过程虽然漫长,但对于高效微型机器人的发展来说,是一个重要的步骤。


这个项目是一架配备了树莓派Zero 2 W和相机模块V3的微型FPV(第一人称视角)无人机。它不仅能够进行现场视频录制,还支持模拟信号传输,让飞行爱好者可以通过FPV眼镜实时体验飞行的乐趣。无人机的设计紧凑轻巧,适合在室内环境中飞行,也可以进行轻微的室外飞行。


此外,项目还提供了几个3D打印部件的STL文件,包括用于安装树莓派到Pavo 20机架的支架、飞行保护器的顶部和底部(最终因散热问题未使用),以及用来保护树莓派的部分。这些部件的设计都旨在为无人机提供必要的保护和支撑。来源:
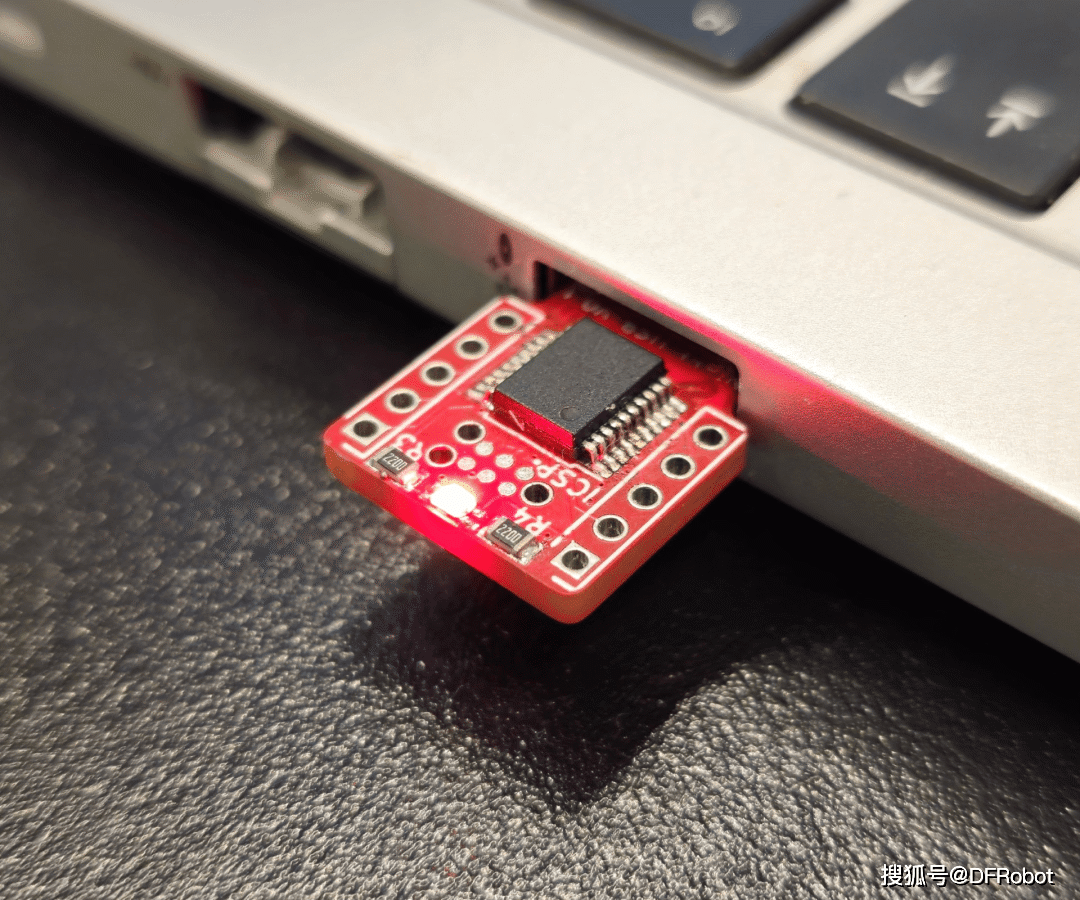
PIC18F14k50完全兼容USB-2.0标准,而且开发板上大多数I/O引脚都可用,即使你没有任何与USB相关的项目,也可以将其作为常规开发板使用。
该项目已完成,提供的.hex文件和软件代码已经过测试。代模拟每15秒小幅移动鼠标,并闪烁LED灯,这可以在自动化测试或其他场景下保持你的电脑持续运行(但请勿用于远程工作作弊!)。
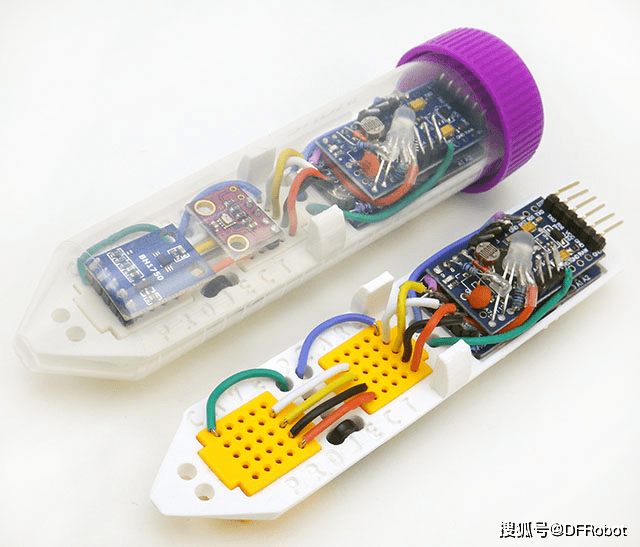
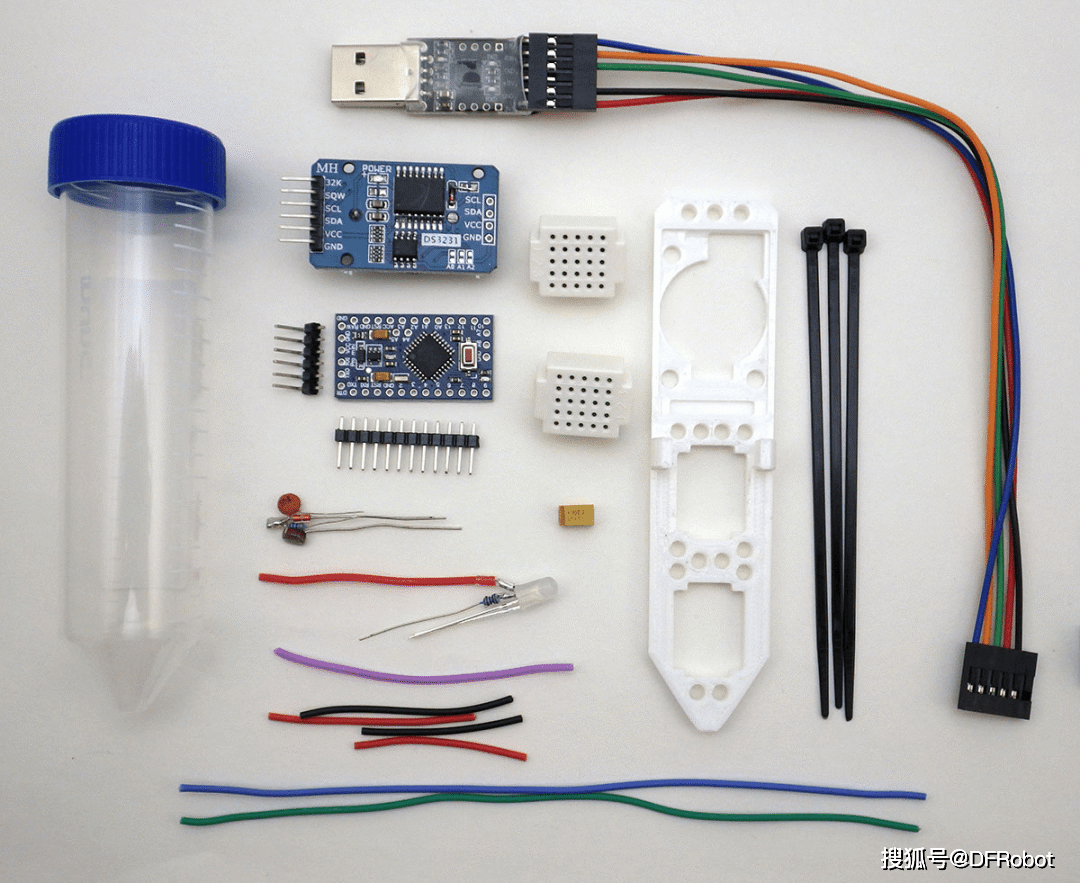
e360使用标准的50mL离心管作为防水外壳,可以在几米深的水下使用。其设计简约而经济,适合作为教育工具,虽然它只支持模拟和I2C传感器,不能进行高频采样,但足以满足大多数教学需求。
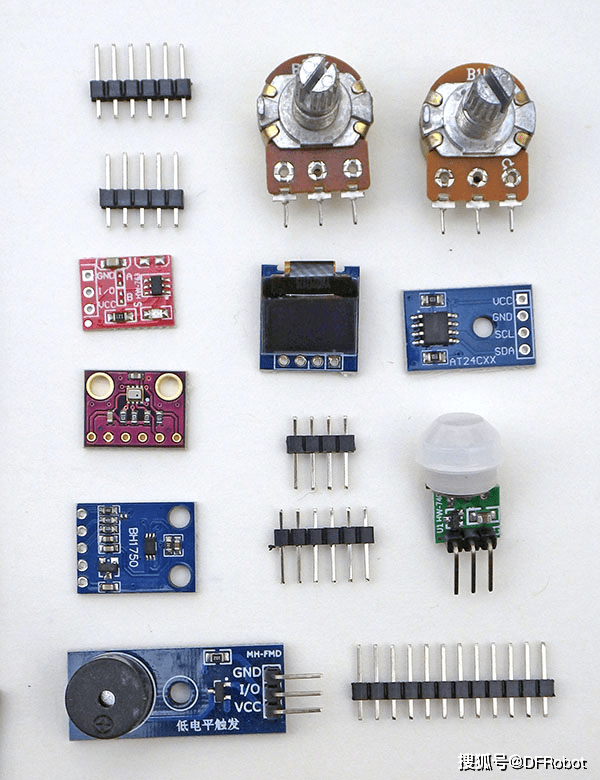
传感器:TTP233触摸传感器、BMP280气压传感器、BH1750光照传感器、AM312红外传感器、1k & 10k电位器等
该项目的代码和组装教程可以在GitHub上找到,价格大约10美元,取决于零件的采购渠道。这个项目不仅适合科学实验室,也适合想要了解数据记录器构建和运作的创客爱好者。

Jumperless 是一款无需使用跳线的创新面包板,它搭载了漂亮的 RGB LED 灯,为电子项目增添了色彩和实用性。这款面包板采用了 12 个 CH446Q 集成电路,每个 IC 都包含了一个 8×16 矩阵的 128 个模拟开关,这使得用户可以在不使用任何跳线的情况下构建电路。虽然模拟开关会增加一些电阻,但对于低功率的项目影响不大。如果偶尔遇到问题,你也可以使用传统的跳线。
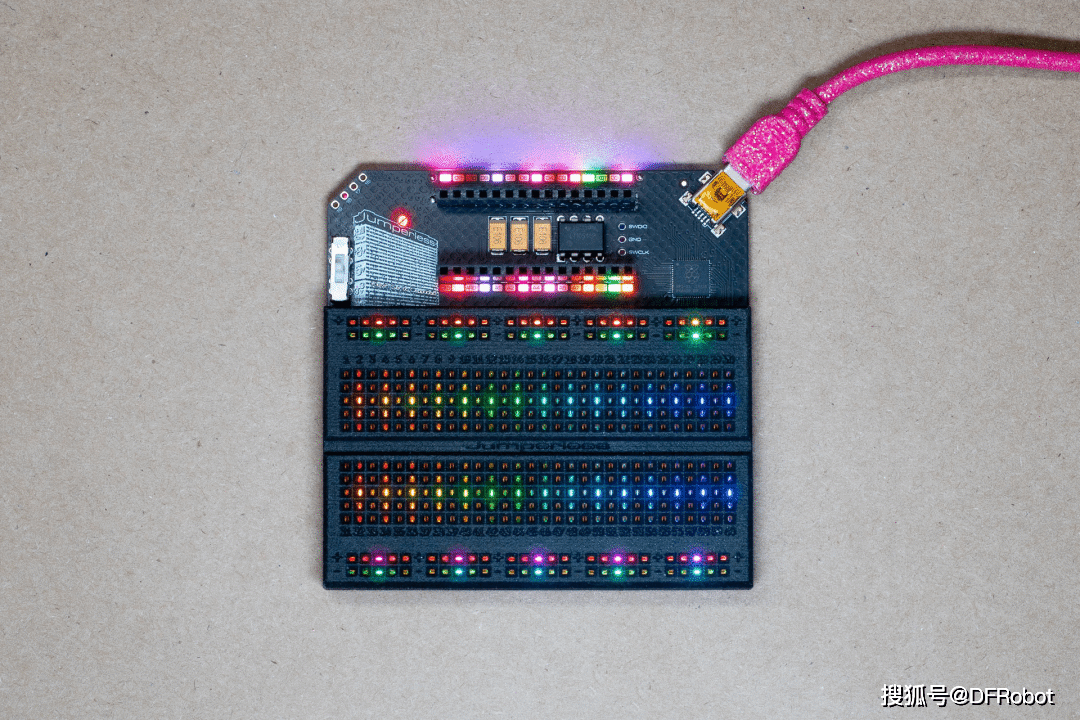
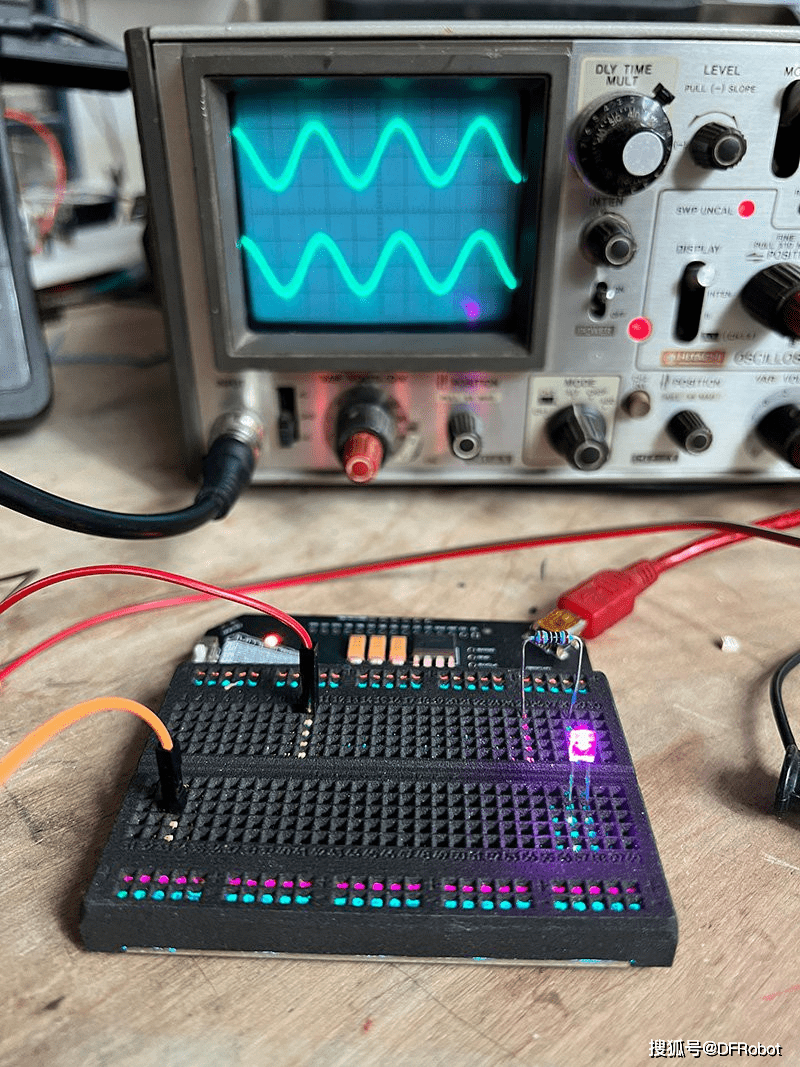
Jumperless 还提供了完整的组装服务,包括外壳选项和带有闪光效果的 USB 数据线。如果你愿意自己完成一些通孔焊接,还有可能获得折扣。更多的功能和使用案例可以在产品页面和 hackaday.io 的项目页面上查看,此外,上还有一个论坛供用户交流。