


来源:bsport体育注册 作者:bsport体育登录|发布时间:2024-12-23 11:40:07
大家对电机的认识可能就是高中课本里的交变电流章节的例子,电刷+外磁场+通电线圈。这是最经典的有刷电机。但是今天咱们谈论的是另一种更高效、性能更好的电机——无刷电机。
如图是无刷电机的等效模型。内外两个灰色的轮子一个是定子,一个是转子(具体哪个是定子哪个是转子根据电机类型有所不同)。此时转子和定子是完全重合在一起的,没有扭矩的存在。
所有的电机扭矩的大小正比于内外两个磁场的叉乘,即图中围出的平行四边形的面积。可见两个磁场重合时,叉乘为0,扭矩也为0,和之前的直观认知相符合。显然,当两个磁场呈90度时,平行四边形面积最大,此时的扭矩也最大。
实际的无刷直流电机(BLDC)或永磁同步电机(PMSM)通常用三相****交流绕组线圈充当定子,永磁体作为转子。我们希望通过电路控制定子绕组的输出,使之能够能产生一个大小尽可能恒定的旋转磁场,让转子和定子的扭矩达到最大值。
FOC(Field-Oriented Control),即磁场定向控制,也称矢量变频,是近几年较为主流的高效控制无刷直流电机(BLDC)和永磁同步电机(PMSM)的选择。
要得到一个恒定大小的旋转磁场很容易。当今主流的BLDC和PMSM电机定子均采用的是三相绕组,即各个绕组上的交流信号就是相位互差120°的信号。根据三相电机的结构,我们可以将一个恒定大小的旋转电压矢量分解到相位互差120°的方向上。如下图
从上图可以看到,只要控制电机的三个绕组产生相位互差120°的大小随着时间按正弦规律变化的3个分矢量,就可以得到我们想要的旋转磁场
然而,在实际的电机控制中,由于齿槽效应、磁通畸变等因素,电机的转矩会产生大量的波动,需要不断地对控制信号做出修正。但是当电机转速较高时,电流环必须跟踪频率不断提高的弦波信号,而且还要克服振幅和频率不断提高的电机反电动势。在这样的情况下,想要直接通过维持三路正弦信号得到旋转平滑、大小稳定并且一直保持和转子磁场方向垂直的磁场难以实现。
我们重新回到一开始的磁场叉乘。我们发现电机的转矩只与 平行于内磁场方向(称d轴)的磁场分量 和 垂直于内磁场方向的分量(称q轴)有关(如下图)。
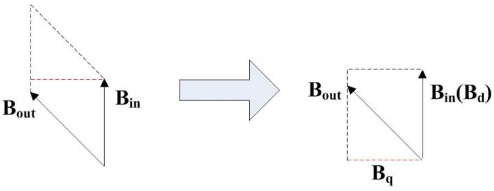
现在对于电机扭矩大小的控制就变成了q轴和d轴大小乘积的控制。在电机中,d轴上内磁场的大小是永磁铁产生的,是恒定的;我们对外磁场的控制实质上变成了q轴上的分量大小控制+外磁场的角度。
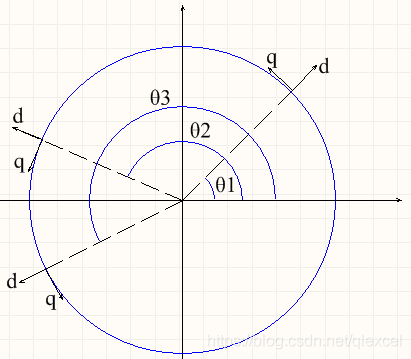
如上图所示,如果转子的电角度在θ1,则我们就要在θ1处产生d、q轴大小的外磁场。如果转子的电角度在θ2,则我们就要在θ2处产生d、q轴大小的外磁场。
我们把角度θ1的情况单独提出来,把它移到原点去,然后把x、y轴重命名为α,β。根据空间矢量的关系,我们可以把q、d轴的大小分解到α,β轴上。这个过程就是所谓的“反帕克(Park)变换”。
绕了这么多弯弯,我们终于让电机转起来了。大家看到这里可能会说:“这是在折腾啥?(╬ ̄皿 ̄)不还是最后转成三个相差120°的正弦信号了吗?”
我们先测量电机的3相电流。电机的信号如下图所示(把相差120°的电信号看成同一个旋转向量在三个相差120°坐标轴上的投影)
根据我们之前的理论,我们需要的是两个互差90°的磁场。这里咱们又使用一个变换,把三个分磁场变换成α、β方向上的两个分磁场。这个叫做“克拉克(Clarke)变换”。
再把α,β轴上的值映射到旋转的q、d轴上,得到此时电机实际的d值和p值。这是之前反Park变换的逆过程,“帕克Park变换”
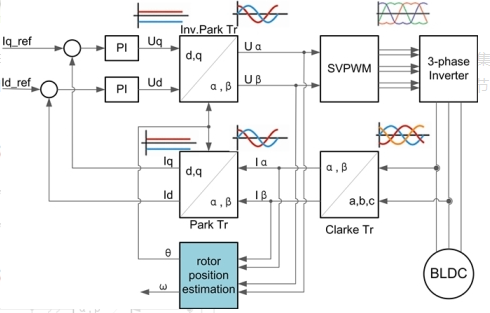
我们把测量到的d、q轴值与我们设定的值做对比,通过PI算法消除误差,再重新通过之前的流程输入到SVPWM中,这就完成了一个闭环控制,可以对定子磁场的做动态修正了。因为控制d、q是在控制电流值,所以这个环路叫做电流环。
测量q、d轴的值:测量电机的相电流(测量两相,通过Ia+Ib+Ic=0得到第三相),然后通过Clarke变换得到Iα和Iβ,然后通过park变换得到q、d轴的值。
把测量到的d、q轴值与我们设定的d0、q0做对比,进行PID处理。(目标是让测量值与我们的设定值相同)
调整d、q值输出,回到1.除了电流环之外,由于d、q是直流信号, 我们通过d、q也可以更轻松地控制电机的转速和旋转位置。比如设定电机转速为1000Rpmin,编码器测得当前转速为500,同样用PID算法增大q值就可以加大扭矩,让电机的速度加快了。这个环路叫速度环,即在电流环的外面加一层,改变q、d设定值来改变速度。当然我们也可以加上位置环,通过对速度的积分可以得到电机的位置,计算位置误差进行PID调整。看ヾ(✿゚▽゚)ノ,我们把对三相交流正弦信号的控制转换成了对直流信号d,p的控制,这样优势就出来了,很nice~
除了FOC之外,还有其他控制电机的方法,比如梯形波式控制、弦波控制等。详细介绍可以参考这篇文章
简单概括,弦波式换相能让电机在低速下运转平稳,但在高速运转下效率却大大降低;而梯形波式换相在电机高速运转下工作比较正常,但在电机低速运转下,会产生力矩的波动。因此,矢量控制是对无刷电机的最佳控制方式~
前言 随着控制技术的发展以及社会对节能要求的提高,直流无刷电机作为一种新型、高效率的电机得到了广泛的应用。传统的直流无刷电机采用方波控制方式,控制简单,容易实现,同时存在转矩脉动、换相噪声等问题,在一些对噪声有要求的应用领域存在局限性。针对这些应用,采用正弦波控制可以很好的解决这个问题。 直流无刷电机的正弦波控制简介 直流无刷电机的正弦波控制即通过对电机绕组施加一定的电压,使电机绕组中产生正弦电流,通过控制正弦电流的幅值及相位达到控制电机转矩的目的。与传统的方波控制相比,电机相电流为正弦,且连续变化,无换相电流突变,因此电机运行噪声低。 根据控制的复杂程度,直流无刷电机的正弦波控制可分为:简易正弦波控制与复
简易正弦波控制 /
引言 电涡流测功机主要用于测试发动机的功率,也可作为齿轮箱、减速机、变速箱的加载设备,用于测试它们的传递功率。扭矩加载的稳定性及测量的准确性将直接影响工程人员对结果的分析判断。研制出控制品质优良的扭矩加载,将提升国产测功机的技术水平,并促进发动机及其测控行业的发展。 近年来,ARM内核微发展迅速,其性能高、耗电少、成本低,具备16/32位双指令集。本文选择TI公司的TM4C系列芯片,其拥有Cortex M4内核,具备多个高精度定时器,可以输出多路互补且带有死区时间控制的PWM波形,满足电涡流测功机的控制需求。 对于扭矩加载系统来说,除了要求有强大的通用功能外,还需要其具有良好的实时性能,以满足控制系统实时采样和
加载设计 /
作为电机行业的“新人”, 无刷电机是实至名归的后起之秀,以狂浪之势涌入医疗,工业控制,消费电子和汽车电子等高精度控制行业,“无刷“是不是未来电机行业的发展趋势?本文以案例的形式扒一扒无刷电机那些事! 近年来,无刷电机在医疗,工业控制,消费电子和汽车电子等高精度控制行业广泛应用,无刷电机性能的好坏很大程度上取决于电机驱动器,研发阶段,工程师如何借助示波器快速、便捷、真实的对驱动器信号进行分析?本文主要介绍ZDS4054Plus数椐挖掘型示波器对电机驱动器的典型测试及案例分析。 一、直流无刷电机介绍 随着电力电子的发展和新型永磁材料的出现,无刷直流电机得到了迅速发展,无刷直流电机通过电子器件实现了电机的换相,取代了传统的机械电刷和换相
行业的典型应用 /
1 引言 并联机构是由多个并行链构成的闭环机械系统。相对于串联机构, 由于它的驱动设备安装在固定地点, 位置而不随末端执行点的运动而改变, 由此可带来高速、高精度的运动。并联机构具有刚度大、无关节误差积累和放大、位置反解容易等优点, 与串联机构在应用上形成了互补关系。目前, 对并联机器人研究较多的是6 自由度( 6DOF) 并联机器人, 但在某些场合2~5 个自由度即可满足使用要求, 这类少于6 自由度的并联机器人被称为少自由度并联机器人。少自由度并联机器人由于其驱动元件少、造价低、结构紧凑而有较高的实用价值。 在研发的5 自由度并联推拿机器人及其位置分析的基础上, 以微机、PCI 总线控制卡、PCI 总线数据采集
据悉,制动式动态车轮扭矩控制(DWT-B)系统即将量产并装配于宝马X5上。该系统由宝马和博世的工程师共同开发。制动式动态车轮扭矩控制通过增加发动机扭矩并轻微制动位于弯道内侧的后轮,在车辆高速入弯时提升车辆的灵活性。这样就增加了发动机作用于弯道外侧车轮的驱动力,使车辆更灵活,过弯时更快、并无需大的转向操作,同时保持了相同的安全水平。该功能通过整合发动机管理系统和装配于宝马X5的高性能制动控制系统ESP至尊版而得以实现。自2007年春起,所有四驱的宝马5系均配备制动式动态车轮扭矩控制。 “ESP是继安全带之后在道路安全方面最重要的创新,”博世底盘控制系统总裁WernerStruth博士表示,“在越来越多的情况下,该系统也成
5月14日,比亚迪发布了一项电车扭矩控制技术iTAC(intelligence Torque Adaption Control)。 比亚迪表示,为了让电动车在打牢安全基础的情况下提升驾控性能,独家开发了智能扭矩控制系统 iTAC(intelligence Torque Adaption Control)。此后,iTAC 技术将搭载在 e 平台 3.0 全新车型上。 信息显示,在响应速度上,iTAC 识别精度提升 300 多倍,可提前 50ms 以上预测车轮轮速变化趋势。在轮端抓地力出现异常但还未出现打滑时,系统就已经识别到抓地力异常并提前调整,让车辆恢复稳定。 从比亚迪给出的演示图片可以看出,在冰雪路面驾驶,无i
控制,冰雪路面操控更好 /
引言 在家用电器、供暖、通风、空调)和汽车应用中,DC无刷电机及其驱动器的使用率越来越高。造成这种现象的原因是其所拥有的高效、可靠、紧凑、低维护等级以及低噪声等优点,而这些都将转化为成本的节省。 家用电器常常运用传统技术,比如带有起动电容的AC磁阻单相电机和通用式电机。所有这些解决方案采用AC供电方式,工作速度都是恒定不变的,而且并未关注效率。 如今,客户所提出的要求越来越多,他们渴望拥有改良型功率分配方案、更加优越的性能以及更低的噪声电平:传统技术的局限性正日益凸显出来。 同时,市场竞争对能量-效率比提出了新的更高要求,用户在挑选家用电器时,除了产品的价格之。